Objective
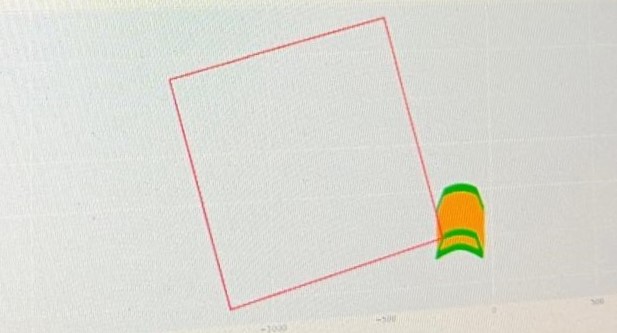
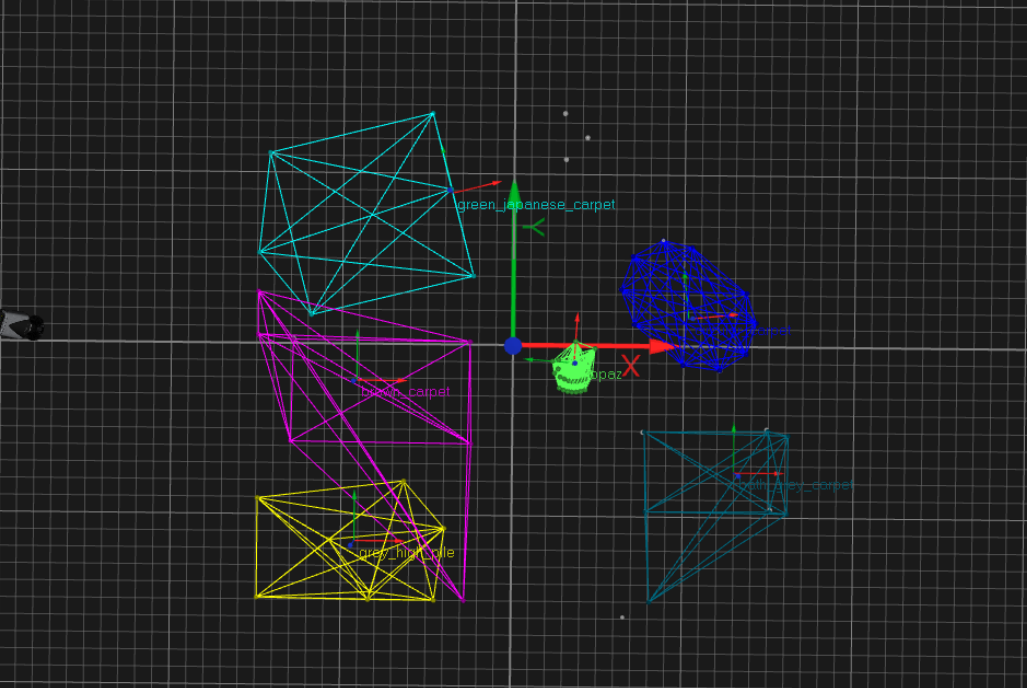
This was one of my primary projects during my time as a System Test Engineer at iRobot. The goal was to test the obstacle avoidance algorithm in an unreleased product by utilizing Qualisys, a 3D motion-capturing system with IR technology. We tested the product on various types of carpets, rugs, and other obstacles, collecting data to analyze how effectively it avoided them. I was responsible for creating a Python script to gather and analyze the data from Qualisys, generating plots to assess whether the robot ever crossed over the carpets and what path it took after detecting an obstacle.