Frame Design
My design process began with brainstorming and conceptualization. I focused on creating a solution that could be transitioned between indoor and outdoor environments while ensuring durability and ease of assembly. Given the need for frequent relocations and the potential for repeated use across various projects, I selected 40x40 T-slot Aluminum Extrusions as the primary structural material. These extrusions were chosen for their lightweight, durable, and weather-resistant properties, along with their ease of assembly and the availability of compatible connectors and joints.
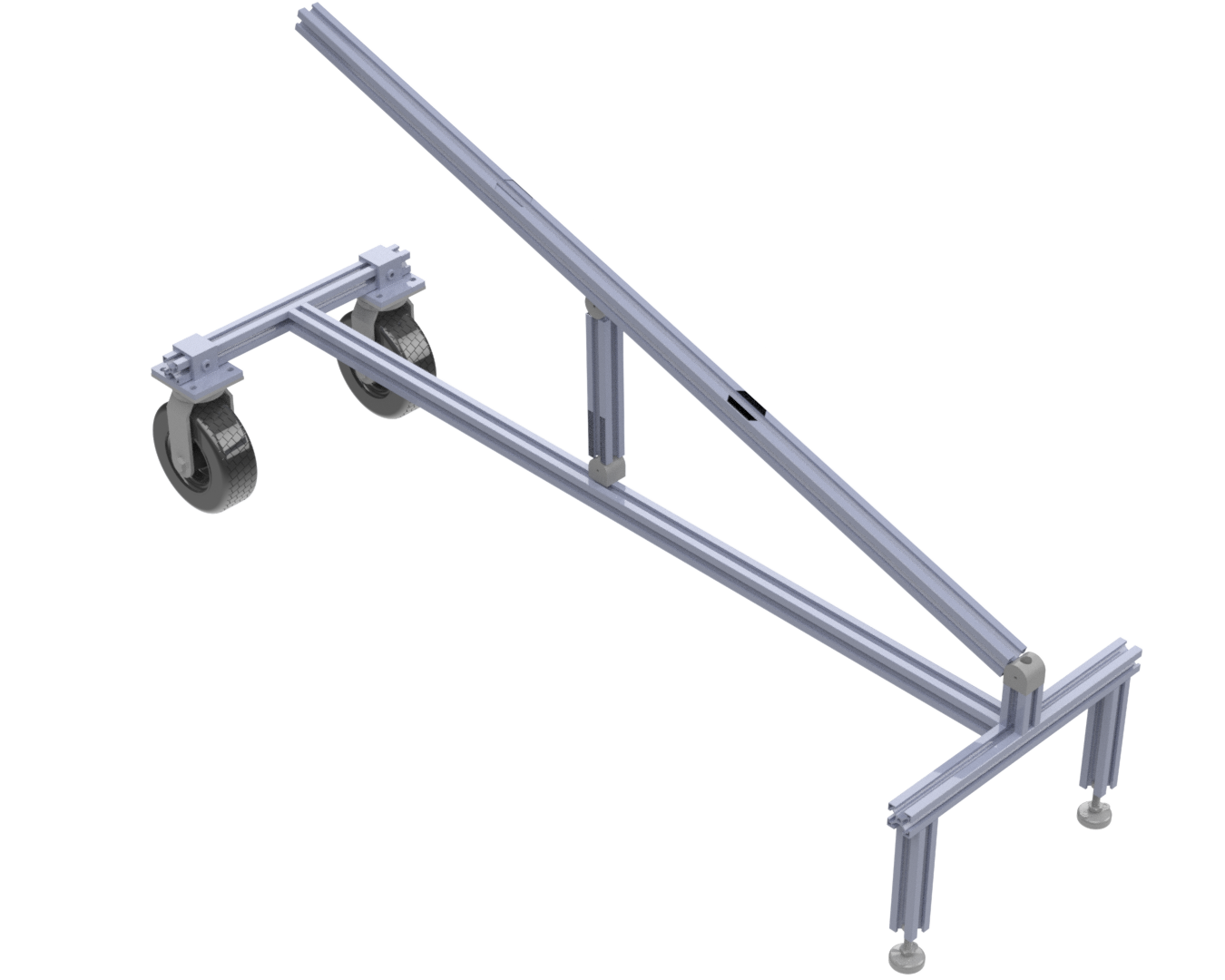
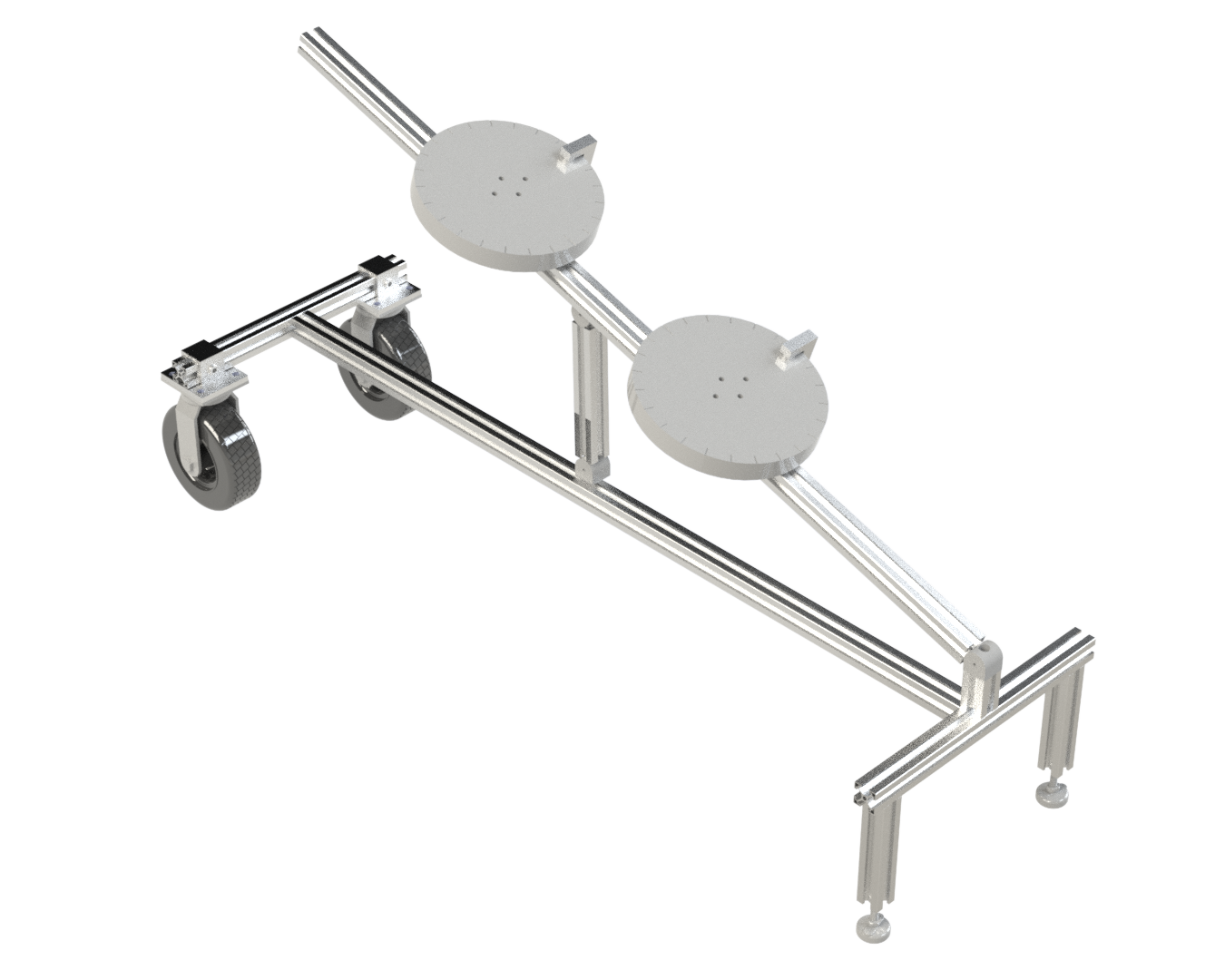
The frame's design features an I-shaped base to maximize stability while minimizing material usage. The centerpiece of the frame measures 1.5 meters in length, with side pieces of 0.5 meters each. To enhance mobility and stability, I used McMaster-Carr solid rubber wheels with an 8-inch diameter. These wheels are extremely robust to support the assembly’s weight, require little to no maintenance, and are well-suited for outdoor use on various terrains, including grass and dirt. To simplify operation, all wheels were clustered on one side of the frame, allowing the operator to easily lift the opposite end and maneuver the assembly. For additional support, I used two Robotunits adjustable beams and stands instead of extra wheels, enabling the fixture to be perfectly leveled in different environments. The image on the right shows a 3D model of the frame with the wheels and the stands.
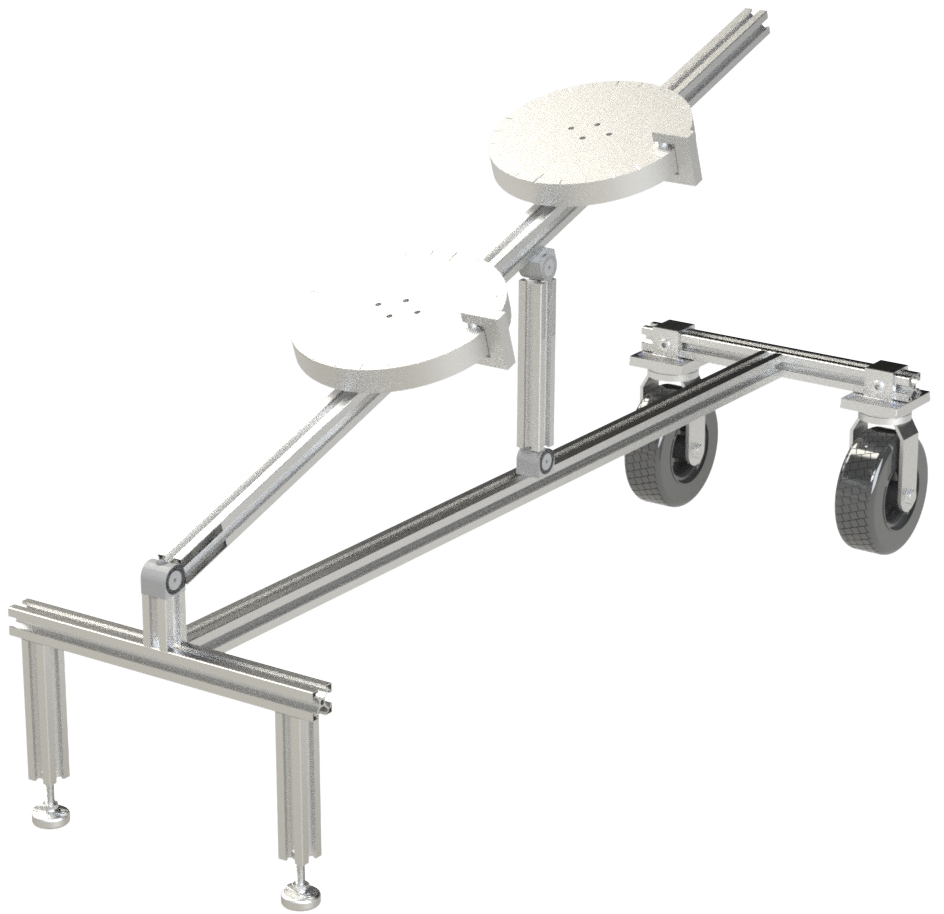
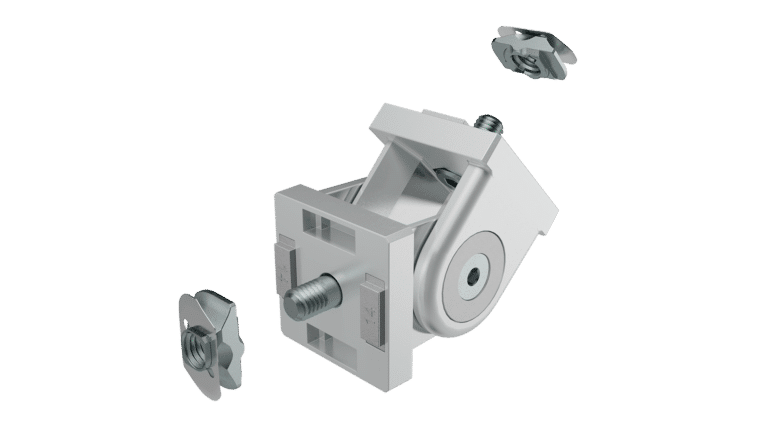
The most complex part of the design was developing a structure capable of adjusting the angles of both the robot and the docking station relative to the ground. After looking back at a couple early sketches, I opted for a simple triangular design. This design includes a 1.5-meter beam attached to a Robotunits hinge at the end of the assembly, serving as a track for the dock and robot to move freely along its length. A 0.25-meter beam, equipped with hinges on both ends, was incorporated between the base and the track to facilitate changes in the angle with respect to the ground. This allows the users to adjust its position before locking the assembly securely in place. The image on the right shows a 3D model of the frame with thetriangular design.